
疫苗补苗自动化
结合疫苗 KB 知识库,AGV 接收补苗指令后自主规划路径,机械臂取苗 + 视觉核验 + 送达接种台,全程零接触。
- 补苗效率提升 4 倍
- 人工取苗差错率降至 0
- 冷链暴露时间 < 15s
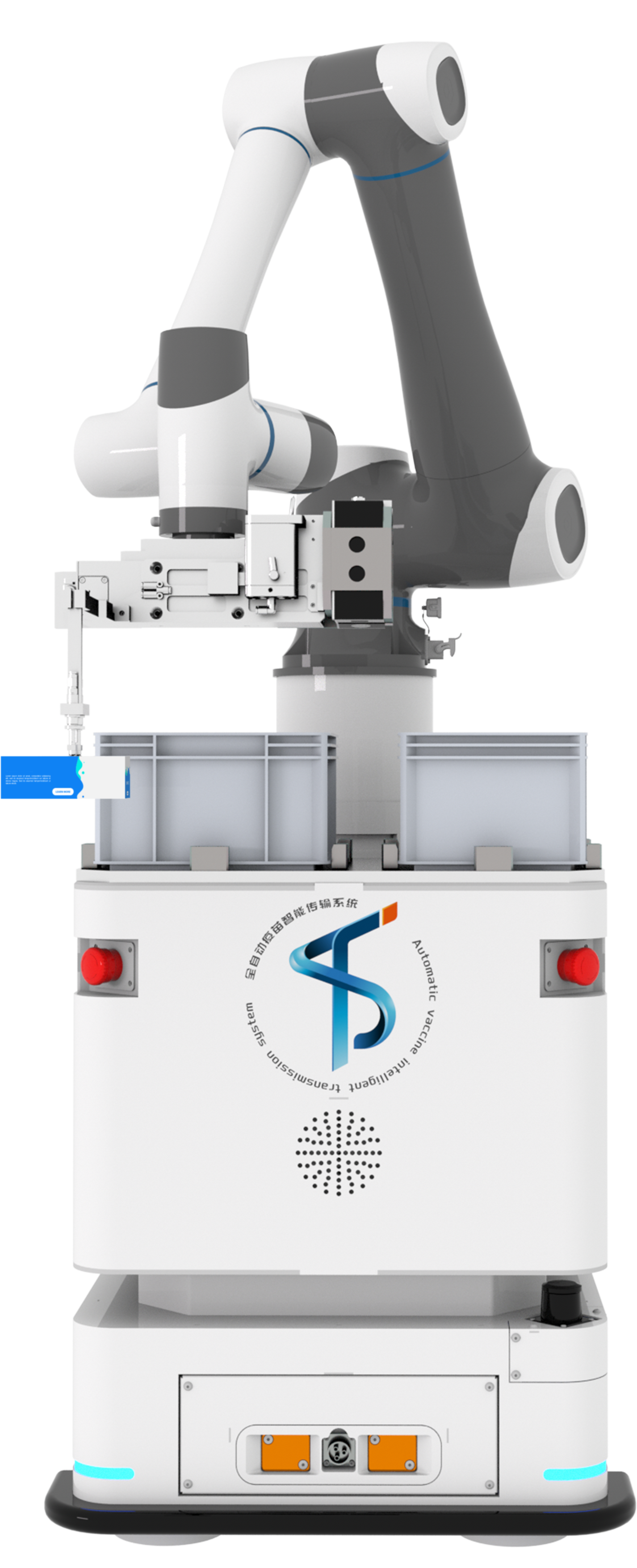
Technology · Mobile Robot
AGV 自主移动底盘 + 6 轴协作机械臂 + 3D 视觉识别, 三合一复合机器人系统,毫米级定位精度, 工业级载重,长续航设计。
毫米级
定位精度
工业级载重
额定载重
长续航
续航时间

AGV 底盘
自研 SLAM 导航底盘,无需导轨改造,标准地面即可部署。
500 kg
额定载重
±5 mm
导航精度
1.5 m/s
运行速度
8 h+
续航时间
2 h(快充)
充电时间
5°
爬坡能力
IP54
防护等级
SLAM + QR 融合
定位方式
部署条件说明
标准混凝土地面(平整度 毫米级),无需预埋磁条、二维码或反光板。 首次部署包含场地勘测、SLAM 建图调试服务,建图时间约 2-4 小时(视场地面积)。 支持多层楼间部署(配合电梯对接模块)。
协作机械臂
采用轻量化铝合金结构,力矩传感器主动碰撞检测,人机协作安全等级 Cat3 PLd。 支持 UR 兼容协议,可与现有 UR 机器人周边设备和工装夹具无缝对接, 降低客户切换成本。
自由度
6 轴
有效负载
5 kg
臂展
850 mm
重复定位精度
±0.02 mm
接口兼容
UR 兼容协议
安全停止
Cat3 PLd
碰撞检测
力矩传感器主动感知
控制方式
示教 / 在线编程 / API
导航系统
激光雷达 + 深度相机 + 超声波,SLAM 自主建图,动态环境自适应,安全冗余设计。
激光雷达 + IMU 融合 SLAM,无需预埋磁条或二维码,首次部署自主建图后即可运行,适应动态环境变化。
激光雷达 + 深度相机 + 超声波三合一,3D 障碍物检测,安全距离 0.3m 自动减速,0.1m 紧急停止。
Fleet Manager 统一调度多台 AGV,路径规划避免死锁与冲突,支持优先级任务抢占和充电站轮换策略。
实时检测环境变化,在 200ms 内完成路径重规划,确保临时障碍(如人员、货架移动)不阻断任务执行。
复合机器人
三系统深度集成,非简单叠加,共用统一控制器和任务调度层,协同响应延迟 < 50ms。
AGV 底盘(SLAM 导航)+ 6 轴协作臂 + 3D 视觉一体化集成
机械臂工作半径 850mm,覆盖货架全层取放
视觉引导精确定位,适应 ±30mm 货位偏差
支持货架间隙 < 600mm 的窄道通行
Fleet Manager 统一管理,任务队列动态分配
OPC-UA 接口对接 MES / WMS,全程数字化追踪
应用场景
每个场景均有实际项目交付经验,非纸面方案。
结合疫苗 KB 知识库,AGV 接收补苗指令后自主规划路径,机械臂取苗 + 视觉核验 + 送达接种台,全程零接触。
3D 视觉识别药品位置与姿态,协作机械臂按处方单精准取药,分拣准确率 99.8%,单日处理订单 2000+ 件。

恒温样本箱 + AGV 底盘,全程温度监控,转运路径优化,实验室内样本转运时间显著缩短,减少人员交叉污染风险。