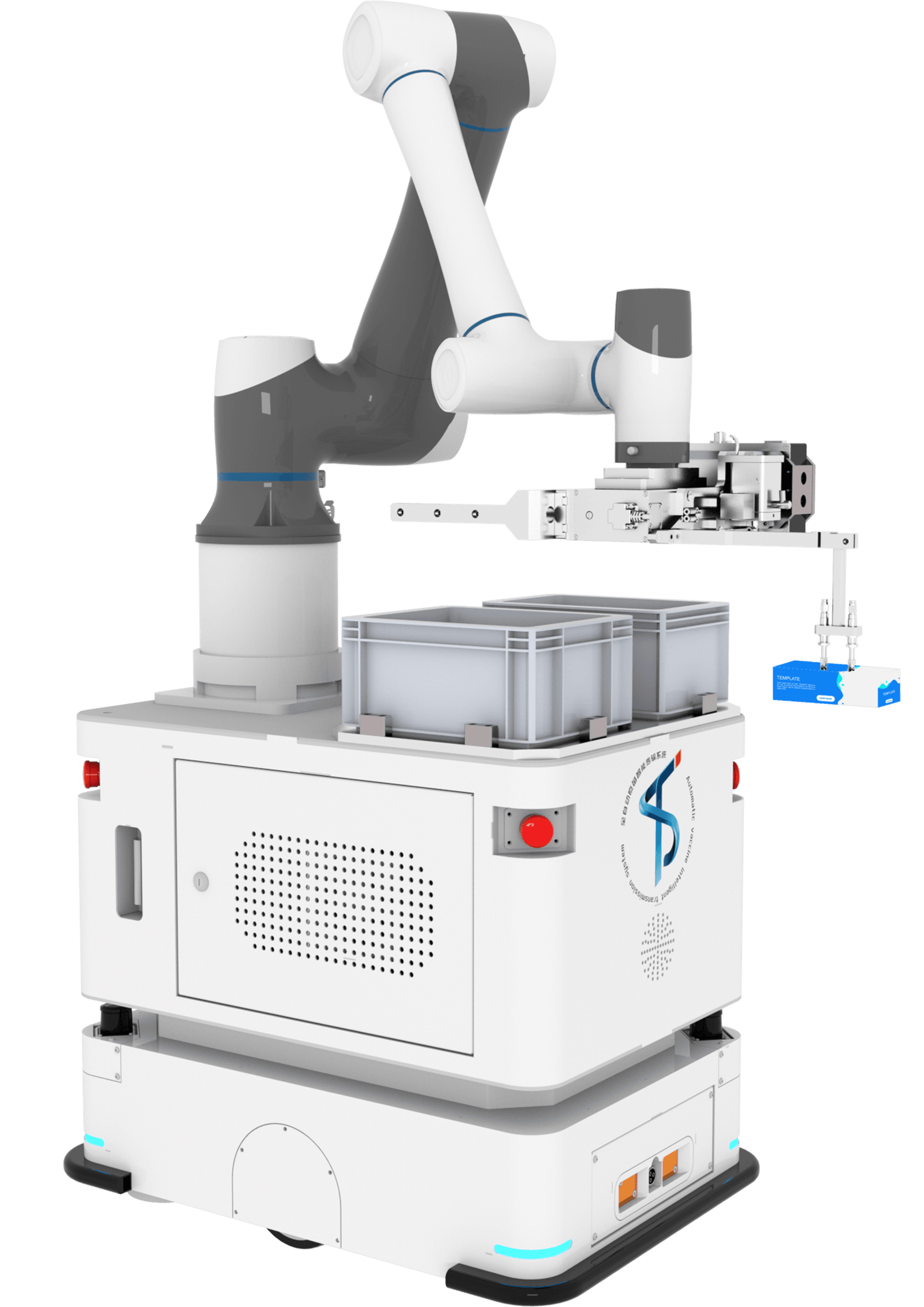

机械臂抓取定位
3D 视觉实时输出目标物体 6-DoF 位姿,机械臂根据抓取坐标直接执行,无需固定夹具定位,适应货位偏差 ±30mm。
抓取高成功率Technology · 3D Vision
结构光 / ToF / 双目立体三方案,点云处理管线完整, 6-DoF 姿态估计引导机械臂精准抓取, 高成功率,-10°C 低温环境稳定工作。
高成功率
抓取成功率
< 50ms
处理延迟
0.05mm
点云分辨率
3D 相机方案
没有万能方案,根据精度要求、环境光照、帧率需求和预算选择最适合的技术路线。
Structured Light
优势
局限
推荐场景
精密电子件、药品条码六面识别
Time of Flight
优势
局限
推荐场景
AGV 障碍检测、快速动态抓取
Binocular Stereo
优势
局限
推荐场景
仓库货架盘点、大范围场景感知
点云处理
完整的点云处理管线,每步均有工程验证,整体延迟 < 50ms,满足机械臂实时控制要求。
STEP 01
3D 相机以 25–60fps 实时输出深度图,转换为三维点云数据(XYZ + RGB)
STEP 02
统计滤波去除离群点,体素下采样降低数据量,保留关键几何特征
STEP 03
ICP / NDT 算法将多视角点云配准到统一坐标系,消除遮挡盲区
STEP 04
欧式聚类 + 深度学习语义分割,区分目标物体与背景、货架、托盘
STEP 05
6-DoF 位姿估计(位置 XYZ + 旋转 RPY),输出机械臂抓取坐标
STEP 06
GraspNet 网络预测抓取点与夹爪角度,碰撞检测确保路径安全
应用场景
3D 视觉实时输出目标物体 6-DoF 位姿,机械臂根据抓取坐标直接执行,无需固定夹具定位,适应货位偏差 ±30mm。
抓取高成功率
结构光相机对疫苗盒进行全六面扫描,识别批次号、有效期、品种编码,误识率 < 0.1%,满足药品追溯合规要求。
识别准确率 99.9%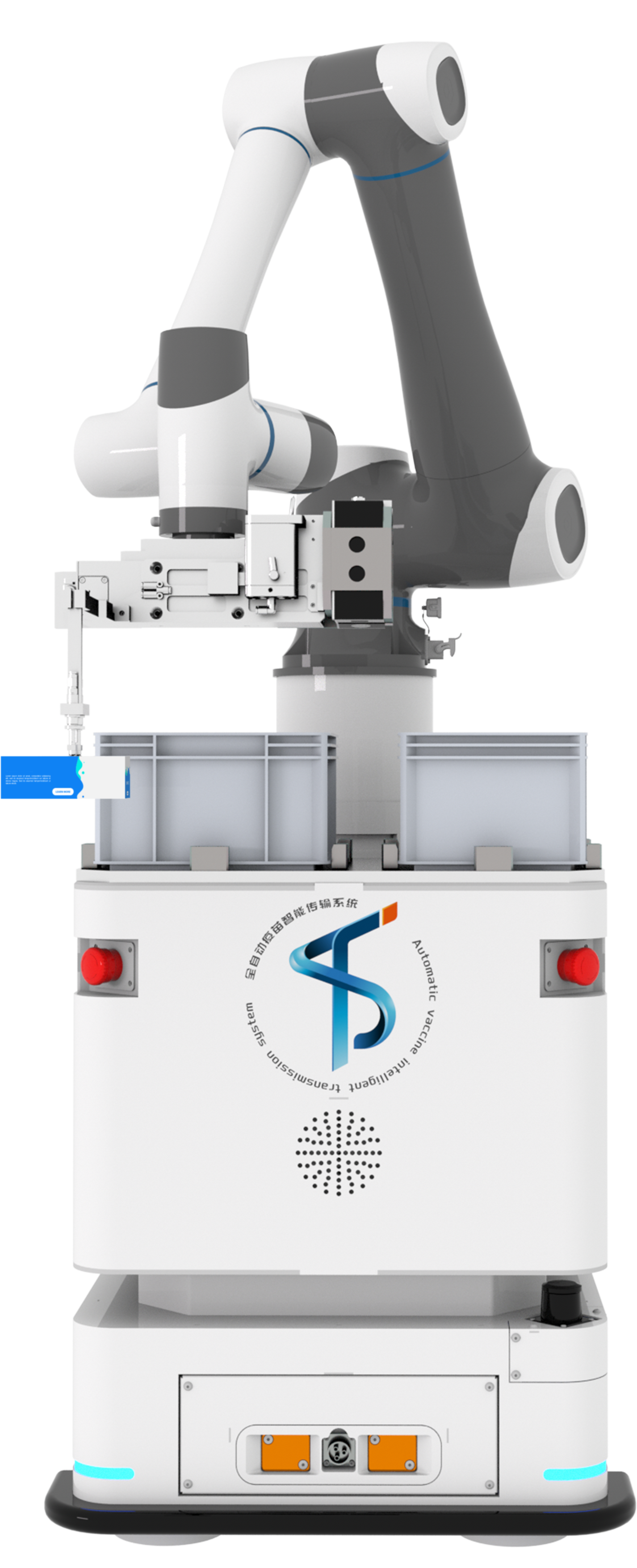
对无固定形态的软包药品、异形容器、未标准化包装物体,通过点云形状匹配和 GraspNet 自适应规划抓取策略。
异形件高成功率★ 金砖大赛 AI 赛道 · 参赛项目
鑫霖参加金砖国家创新大赛 AI 赛道,以补苗机器人为载体, 3D 视觉系统承担疫苗盒位姿识别和机械臂引导两大核心功能。 在真实冷库场景下,-8°C 环境中完成疫苗盒抓取定位, 验证了鑫霖视觉系统在极端温度环境下的鲁棒性。
技术规格
点云分辨率
可达 0.05mm
帧率
25–60 fps(可选)
工作距离
0.2–3.0 m
视场角
60° × 45°(标配)
处理延迟
< 50ms(姿态输出)
工作温度
-10°C 至 60°C
防护等级
IP54
接口
GigE / USB3.0 / ROS2
以上为标配参数,可根据场景需求定制高精度或高帧率版本,请联系技术团队获取选型建议。